9.2 KiB
设计原理
内存分配方式
- 线性分配
- 空闲链表分配
线性分配方式
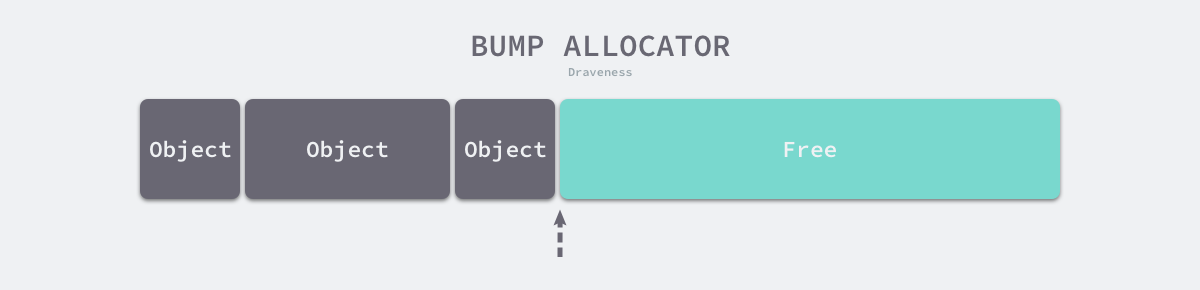
- 线性分配(Bump Allocator)是一种高效的内存分配方法。只需要在内存中维护一个指向内存特定位置的指针,如果用户程序向分配器申请内存,分配器只需要检查剩余的空闲内存、返回分配的内存区域并修改指针在内存中的位置,即移动下图中的指针:
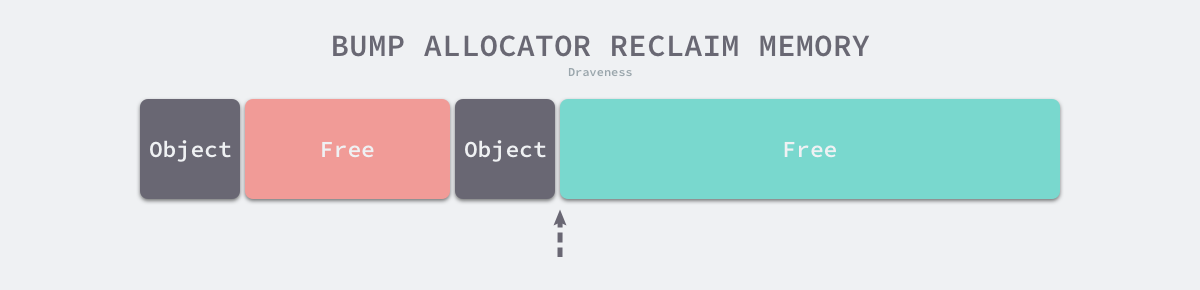
- 线性分配器实现带来较快的执行速度以及较低的实现复杂度,但是线性分配器无法在内存被释放时重用内存。如下图所示,如果已经分配的内存被回收,线性分配器无法重新利用红色的内存:
- 需要与垃圾分配算法配合使用,例如:标记压缩(Mark-Compact)、复制回收(Copying GC)和分代回收(Generational GC)等算法,它们可以通过拷贝的方式整理存活对象的碎片,将空闲内存定期合并,就能利用线性分配器的效率提升内存分配器的性能
空闲链表分配方式
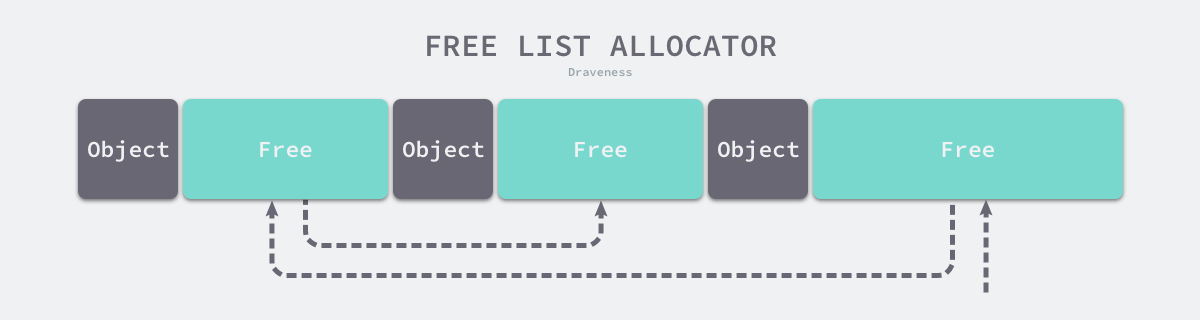
- 空闲链表分配器(Free-List Allocator)可以重用已经被释放的内存,它在内部会维护一个类似链表的数据结构。当用户程序申请内存时,空闲链表分配器会依次遍历空闲的内存块,找到足够大的内存,然后申请新的资源并修改链表:
-
不同的内存块通过指针构成了链表,使用这种方式的分配器可以重新利用回收的资源,分配内存时需要遍历链表,所以它的时间复杂度是 𝑂(𝑛)。空闲链表分配器可以选择不同的策略在链表中的内存块中进行选择,最常见的是以下四种:
-
首次适应(First-Fit)— 从链表头开始遍历,选择第一个大小大于申请内存的内存块;
-
循环首次适应(Next-Fit)— 从上次遍历的结束位置开始遍历,选择第一个大小大于申请内存的内存块;
-
最优适应(Best-Fit)— 从链表头遍历整个链表,选择最合适的内存块;
-
隔离适应(Segregated-Fit)— 将内存分割成多个链表,每个链表中的内存块大小相同,申请内存时先找到满足条件的链表,再从链表中选择合适的内存块;隔离适应策略如下
-
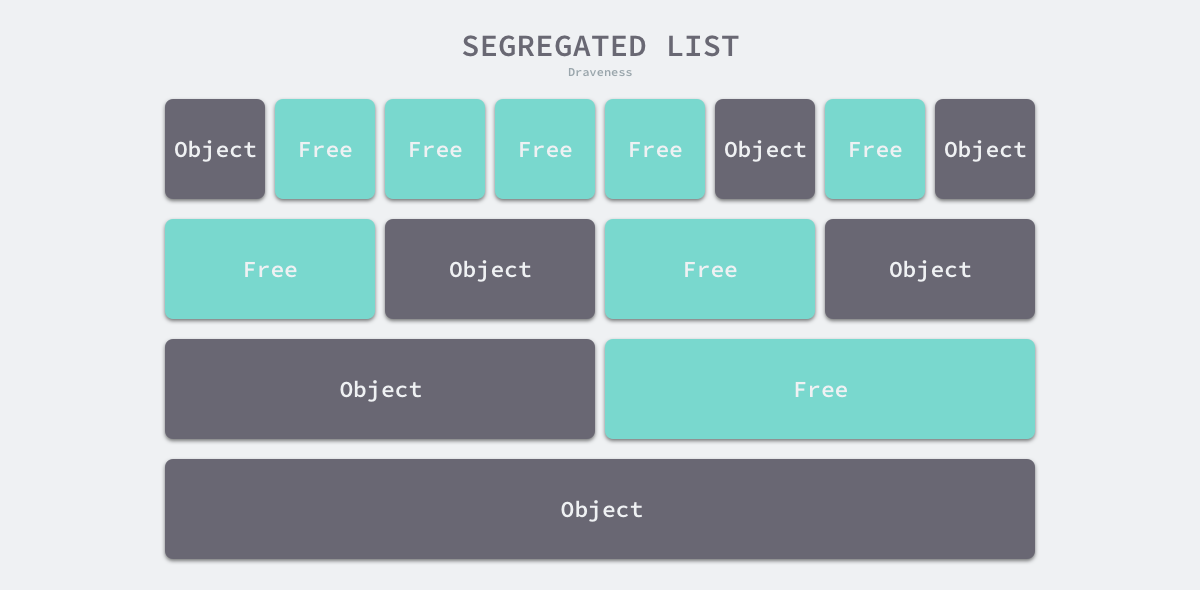
- 隔离适应策略会将内存分割成由 4、8、16、32 字节的内存块组成的链表,当我们向内存分配器申请 8 字节的内存时,它会在上图中找到满足条件的空闲内存块并返回。隔离适应的分配策略减少了需要遍历的内存块数量,提高了内存分配的效率。
分级分配
- Go 语言的内存分配器就借鉴了 TCMalloc 的设计实现高速的内存分配,它的核心理念是使用多级缓存将对象根据大小分类,并按照类别实施不同的分配策略
对象大小
- Go 语言的内存分配器会根据申请分配的内存大小选择不同的处理逻辑,运行时根据对象的大小将对象分成微对象、小对象和大对象三种:
| 类别 | 大小 |
|---|---|
| 微对象 | (0, 16B) |
| 小对象 | [16B, 32KB] |
| 大对象 | (32KB, +∞) |
多级缓存
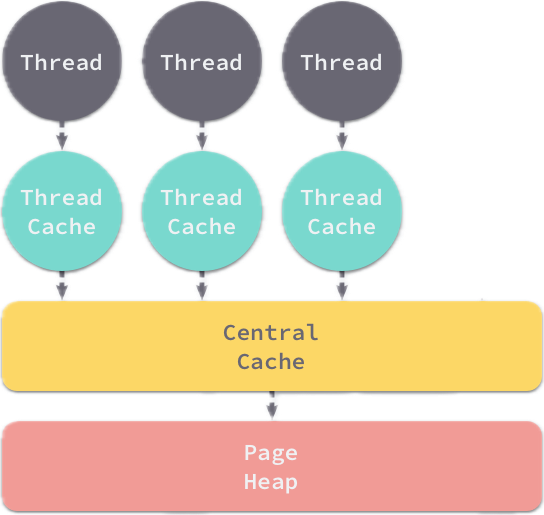
- 内存分配器不仅会区别对待大小不同的对象,还会将内存分成不同的级别分别管理,TCMalloc 和 Go 运行时分配器都会引入线程缓存(Thread Cache)、中心缓存(Central Cache)和页堆(Page Heap)三个组件分级管理内存:
虚拟内存布局
Go 1.10及以前连续分配
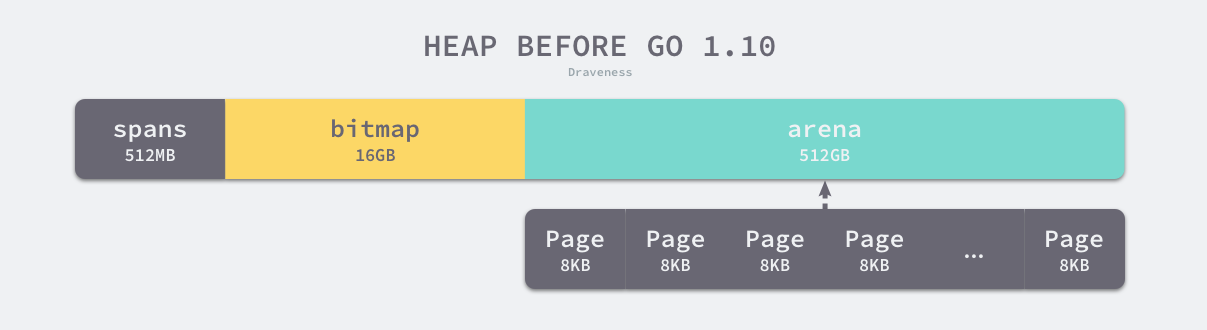
- 启动时会初始化整片虚拟内存区域,如下所示的三个区域
spans、bitmap和arena分别预留了 512MB、16GB 以及 512GB 的内存空间,这些内存并不是真正存在的物理内存,而是虚拟内存:
-
spans区域存储了指向内存管理单元runtime.mspan的指针,每个内存单元会管理几页的内存空间,每页大小为 8KB; -
bitmap用于标识arena区域中的那些地址保存了对象,位图中的每个字节都会表示堆区中的 32 字节是否空闲; -
arena区域是真正的堆区,运行时会将 8KB 看做一页,这些内存页中存储了所有在堆上初始化的对象; -
对于任意一个地址,都可以根据
arena的基地址计算该地址所在的页数并通过spans数组获得管理该片内存的管理单元runtime.mspan,spans数组中多个连续的位置可能对应同一个runtime.mspan结构。
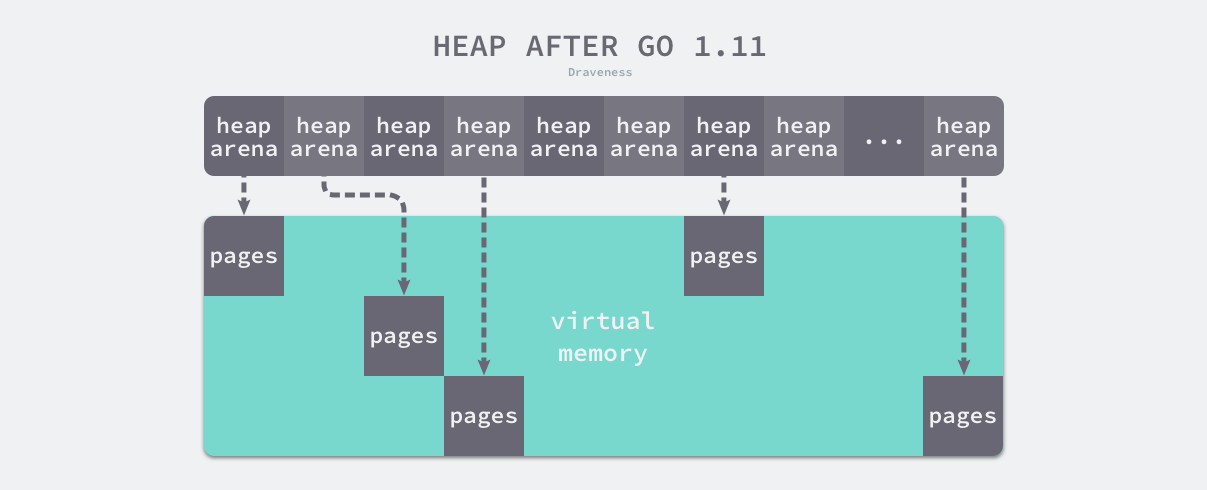
Go 1.11以后稀疏分配
- 稀疏的内存布局能移除堆大小的上限
地址空间
- Go 语言的运行时构建了操作系统的内存管理抽象层,该抽象层将运行时管理的地址空间分成以下四种状态8:
状态 解释 None内存没有被保留或者映射,是地址空间的默认状态 Reserved运行时持有该地址空间,但是访问该内存会导致错误 Prepared内存被保留,一般没有对应的物理内存访问,该片内存的行为是未定义的可以快速转换到 Ready状态Ready可以被安全访问
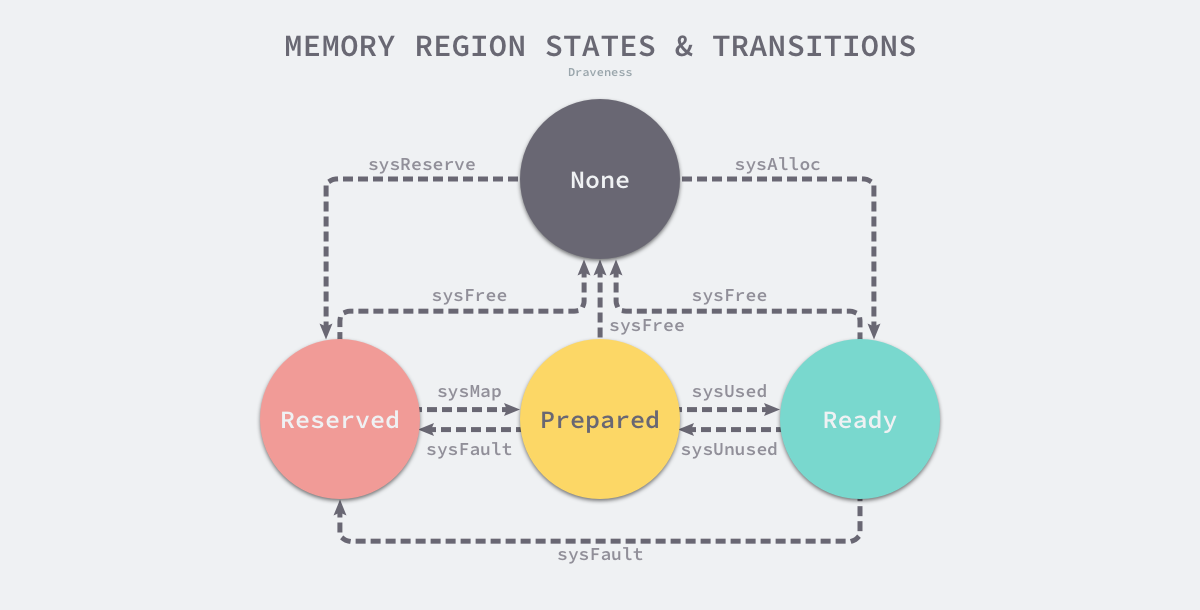
运行时中包含多个操作系统实现的状态转换方法,所有的实现都包含在以 mem_ 开头的文件中,本节将介绍 Linux 操作系统对上图中方法的实现:
runtime.sysAlloc会从操作系统中获取一大块可用的内存空间,可能为几百 KB 或者几 MB;runtime.sysFree会在程序发生内存不足(Out-of Memory,OOM)时调用并无条件地返回内存;runtime.sysReserve会保留操作系统中的一片内存区域,访问这片内存会触发异常;runtime.sysMap保证内存区域可以快速转换至就绪状态;runtime.sysUsed通知操作系统应用程序需要使用该内存区域,保证内存区域可以安全访问;runtime.sysUnused通知操作系统虚拟内存对应的物理内存已经不再需要,可以重用物理内存;runtime.sysFault将内存区域转换成保留状态,主要用于运行时的调试;
运行时使用 Linux 提供的 mmap、munmap 和 madvise 等系统调用实现了操作系统的内存管理抽象层,抹平了不同操作系统的差异,为运行时提供了更加方便的接口,除了 Linux 之外,运行时还实现了 BSD、Darwin、Plan9 以及 Windows 等平台上抽象层
内存管理组件
- 内存管理单元 runtime.mspan
- 线程缓存 runtime.mcache
- 中心缓存 runtime.mcentral
- 页堆 runtime.mheap
Go内存布局
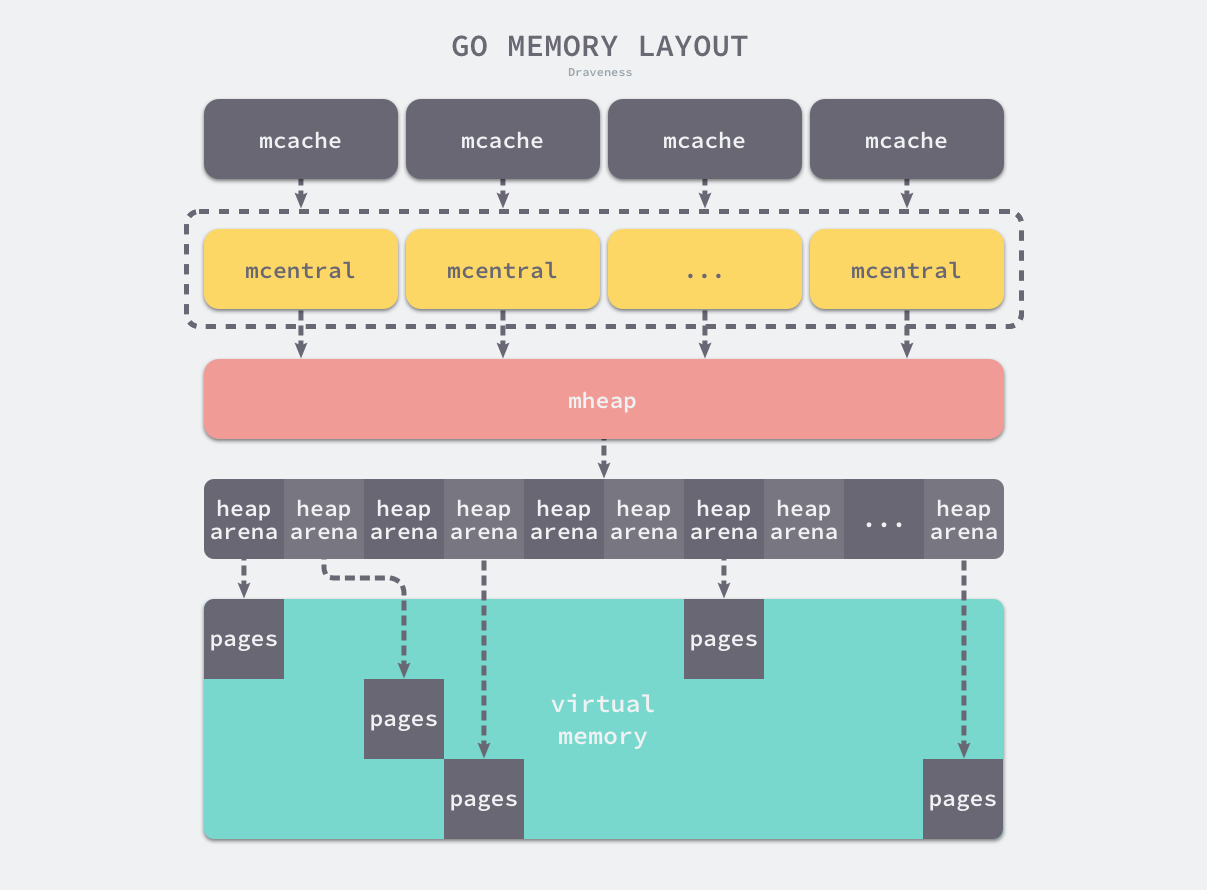
-
每一个处理器都会分配一个线程缓存
runtime.mcache用于处理微对象和小对象的分配,它们会持有内存管理单元runtime.mspan -
每个类型的内存管理单元都会管理特定大小的对象,当内存管理单元中不存在空闲对象时,它们会从
runtime.mheap持有的 134 个中心缓存runtime.mcentral中获取新的内存单元,中心缓存属于全局的堆结构体runtime.mheap,它会从操作系统中申请内存 -
在 amd64 的 Linux 操作系统上,
runtime.mheap会持有 4,194,304runtime.heapArena,每个runtime.heapArena都会管理 64MB 的内存,单个 Go 语言程序的内存上限也就是 256TB。